
micro_ros自定义话题发布频率
Published: Post views:micro_ros自定义话题发布频率
测试环境:
- vmware虚拟机+ubuntu20.04+ros2 foxy
- esp32 (micro_ros_arduino)
0. 写在前面
- micro_ros可以将MCU与ros系统进行无缝集成,实现话题的订阅、发布,服务的建立等;
- 实际使用中,我们可能需要通过micro_ros实现高频的数据传输or通讯;
- 本文基于串口通讯实现micro_ros的话题发布;
- 影响micro_ros话题发布频率的有:串口波特率、定时器频率、QoS策略等;
1. 话题发布频率影响因素
1.1 串口波特率
- 串口通讯中,越高的串口波特率代表单位时间可以传输的数据量更大。
- micro_ros_arduino默认的串口波特率为115200;
- 想要修改默认的波特率,可以自行修改相关的代码;
- 打开micro_ros_arduino文件夹,文件路径:
C:\Users\你自己的用户文件夹\Documents\Arduino\libraries\micro_ros_arduino-2.0.5-foxy\src - 打开
default_transport.cpp,将下图中的115200修改为自定义的波特率 - 可能并非所有波特率都支持,在实测过程中,我使用250000波特率无法实现通讯,使用921600反而可以,官方也并未进行详细解释说明;
- 遇到自定义波特率通讯不成功的问题,可以在micro_ros_arduino提issue;
bool arduino_transport_open(struct uxrCustomTransport * transport)
{
Serial.begin(115200); //修改115200为自定义波特率,如409600、921600等
return true;
}
- 重新编译代码即可;
1.2 定时器频率
- 打开micro_ros中的示例代码:
micro-ros_publisher.ino
// create timer,
const unsigned int timer_timeout = 1000;// 修改timer_timeout
RCCHECK(rclc_timer_init_default(
&timer,
&support,
RCL_MS_TO_NS(timer_timeout),
timer_callback));
- 修改timer_timeout;若timer_timeout=1000,则代表1000ms的定时器,即1000ms发布一次;若timer_timeout=500,则代表500ms的定时器,即500ms发布一次;
- 若tiemr_timeout的值小于100,即希望话题发布的频率>10Hz,需要注释掉
loop循环中的delay(100);
void loop() {
// delay(100);
RCSOFTCHECK(rclc_executor_spin_some(&executor, RCL_MS_TO_NS(100)));
}
1.3 QoS策略
- QoS策略参考官方文档
- 简而言之:
- 若话题发布频率较低,如10~30Hz,使用
rclc_publisher_init_default - 若话题发布频率较高,如>30Hz,使用
rclc_publisher_init_best_effort
- 若话题发布频率较低,如10~30Hz,使用
// create publisher
RCCHECK(rclc_publisher_init_default( /*高频数据传输使用rclc_publisher_init_best_effort*/
&publisher,
&node,
ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Int32),
"micro_ros_arduino_node_publisher"));
- 注意QoS的兼容性,best_effort的publisher必须对应best_effort的subscription;
2. 实测话题发布频率
- 下面的测试需要注释
loop循环中的**delay(100);
2.1 默认波特率+default QoS(rclc_publisher_init_default)
- 基于micro_ros中的示例代码:
micro-ros_publisher.ino - 使用默认波特率115200,仅通过修改timer_timeout改变话题发布频率;依次修改timer_timeout的值为100、10、1,即话题发布频率分别为10Hz、100Hz、1000Hz;
- 使用
ros2 topic hz /micro_ros_arduino_node_publisher查看发布发布频率;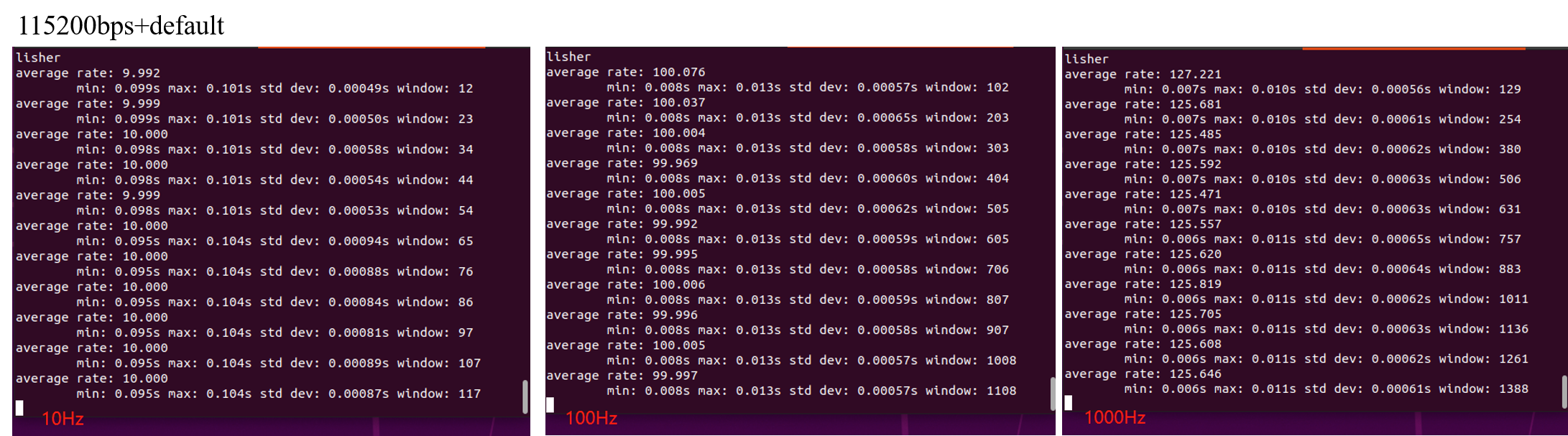
2.2 自定义波特率+default QoS(rclc_publisher_init_default)
- 基于micro_ros中的示例代码:
micro-ros_publisher.ino - 修改波特率为921600,依次修改timer_timeout的值为100、10、1,即话题发布频率分别为10Hz、100Hz、1000Hz;
- 运行micro_agent时需要指定波特率,利用-b设置波特率参数:
ros2 run micro_ros_agent micro_ros_agent serial --dev /dev/ttyUSB0 -b 921600 - 使用
ros2 topic hz /micro_ros_arduino_node_publisher查看发布发布频率;
2.3 默认波特率+best_effort QoS(rclc_publisher_init_best_effort)
- 基于micro_ros中的示例代码:
micro-ros_publisher.ino - 修改
rclc_publisher_init_default为rclc_publisher_init_best_effort - 使用默认波特率115200,仅通过修改timer_timeout改变话题发布频率;依次修改timer_timeout的值为100、10、1,即话题发布频率分别为10Hz、100Hz、1000Hz;
- 使用
ros2 topic hz /micro_ros_arduino_node_publisher查看发布发布频率;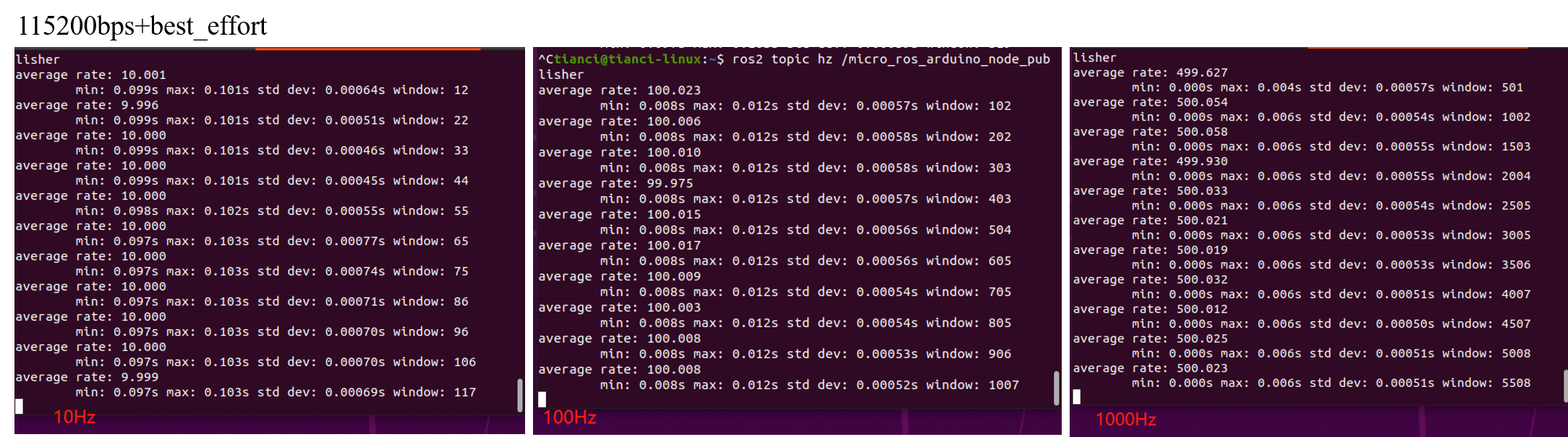
2.4 自定义波特率+best_effort QoS(rclc_publisher_init_best_effort)
- 基于micro_ros中的示例代码:
micro-ros_publisher.ino - 修改
rclc_publisher_init_default为rclc_publisher_init_best_effort - 使用自定义波特率921600,仅通过修改timer_timeout改变话题发布频率;依次修改timer_timeout的值为100、10、1,即话题发布频率分别为10Hz、100Hz、1000Hz;
- 运行micro_agent时需要指定波特率,利用-b设置波特率参数:
ros2 run micro_ros_agent micro_ros_agent serial --dev /dev/ttyUSB0 -b 921600 - 使用
ros2 topic hz /micro_ros_arduino_node_publisher查看发布发布频率;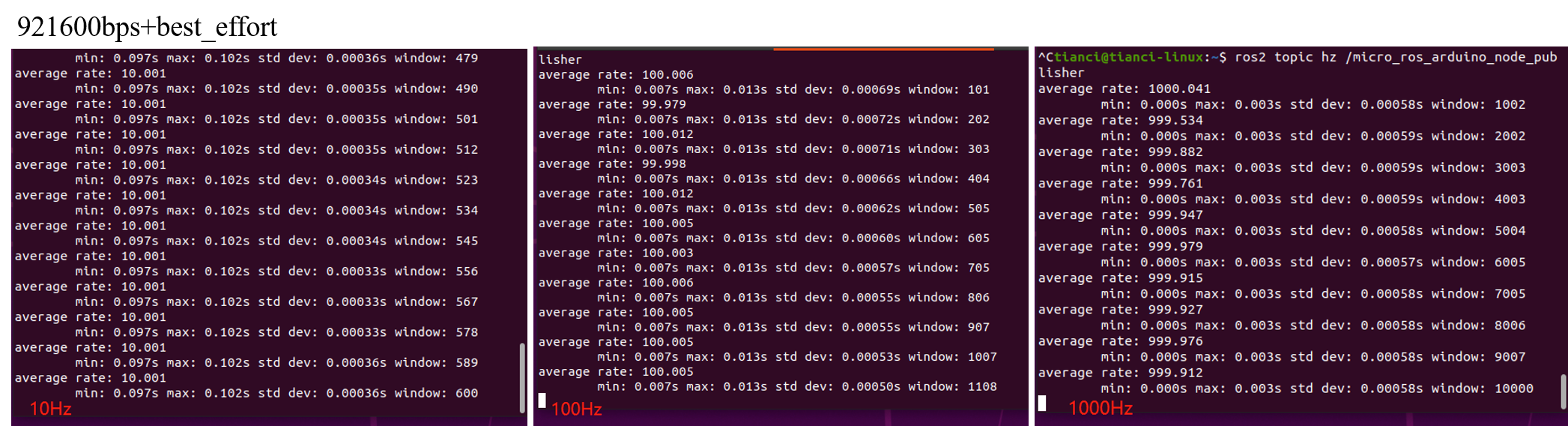
2.5 极限发布频率实测
- 基于micro_ros中的示例代码:
micro-ros_publisher.ino - 修改
rclc_publisher_init_default为rclc_publisher_init_best_effort - 使用自定义波特率921600,设置timer_timeout=0.1,即理论定时器频率10000Hz;
- 运行micro_agent时需要指定波特率,利用-b设置波特率参数:
ros2 run micro_ros_agent micro_ros_agent serial --dev /dev/ttyUSB0 -b 921600 - 使用
ros2 topic hz /micro_ros_arduino_node_publisher查看发布发布频率;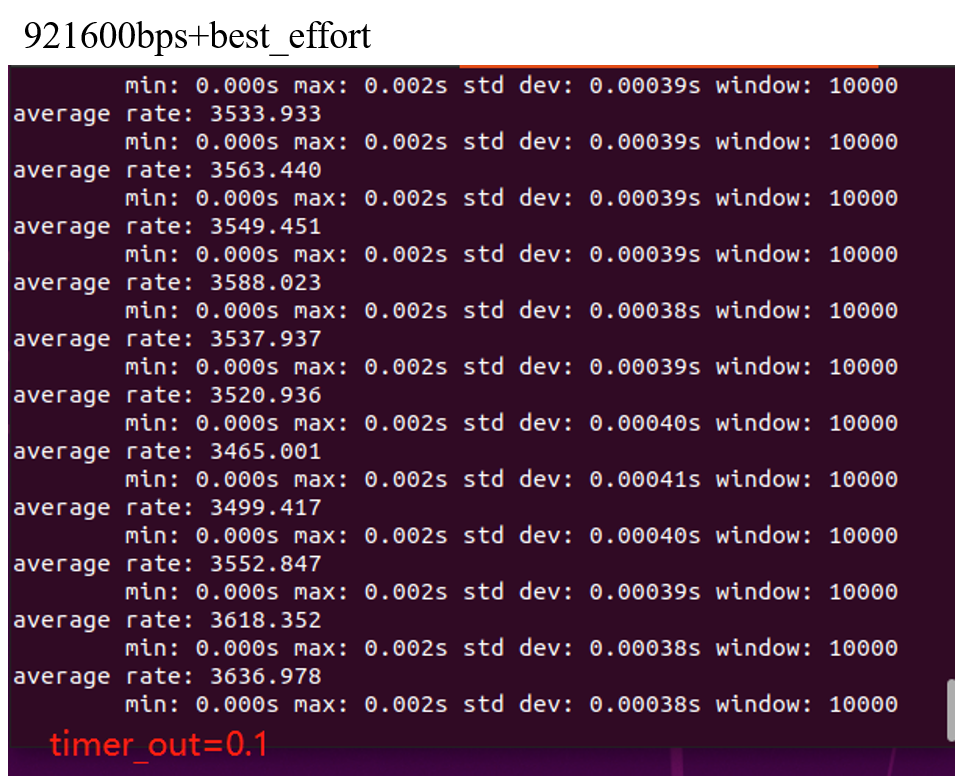
3. 总结
- default模式下,单个int32数据发布极限在300Hz(921600bps下)
- best_effort模式下,单个int32数据发布极限在约3600Hz(921600bps下)
- 一个int32占用4个byte,3600Hz的发布频率对应波特率为:
3600*4*(10/8)*8=144000b/s
- 跟921600bps差别较大,因此波特率已经不是数据发布频率的限制因素了,猜测是定时器;
- 可以参考官方issue
- 但是稳定的1000Hz数据传输应该满足我们绝大部分需求了

Categories: 机器人技术
Comments