
ros2学习(05)—利用参数控制骰子点数
Published: Post views:ros2学习日志(5)—利用参数控制骰子点数
3.0 写在前面
前面我们创建了一个掷骰子游戏1.0,利用服务实现了player与god的交互。
但是,在程序中,我们使用了随机数random.randint(1,6)来模拟骰子的点数,这一点很不爽。
那么,我们能不能控制骰子的点数呢?
答案当然是肯定的,这里需要使用到参数。
3.1 参数的实现
参数的实现与发布、订阅、服务等类似,在节点中声明一个参数即可;
3.1.1 新建god_service_with_param.py
在god/god文件夹内,建立god_service_with_param.py文件,并写入以下代码:(仅仅是对之前的代码进行了稍微修改)
import rclpy #导入ros的客户端库,必备步骤
from rclpy.node import Node #rclpy.node是ros客户端库自带的Node类,用于创建节点
import random #python自带的随机数库
from interfaces.srv import DiceGameService #导入自定义的服务接口,interfaces是package的名称
# .srv是指srv文件夹下
class GodServiceNodeWithParam(Node): #采用面向对象(OOP)的方式建立node; 定义了一个GodServiceNodeWithParam的类,继承rclpy.node中的Node;
def __init__(self,name): #定义初始化方法;或者叫构造函数。。(构造函数是个人的理解,源自C++)
super().__init__(name) #调用父类初始化,需要传入参数name,通常name是实例化的Node的名称,即节点名字;比如本例子中节点名字是 God
self.get_logger().info("GodServiceNodeWithParam初始化成功!") #get_logger().info是rclpy.node中的方法;
self.create_service(DiceGameService,"diceGameServiceWithParam",self.diceGame_callback)
self.declare_parameter("diceNum",0)
# declara_parameter声明参数
# 第一个参数是参数名字,是字符串类型,我们这里定义参数名称是diceNum
# 第二个参数是参数的数值,我们使用0
def diceGame_callback(self,request,response): #掷骰子服务回调函数
#request 客户端请求对象,携带着来自客户端的数据。这这里我们收到的应该是一个int32的数据
#response 服务端响应,返回服务端的处理结果;我们返回布尔数据类型
#返回值:response
if request.input_num == self.get_parameter("diceNum").get_parameter_value().integer_value:
#判断从player收到的数字是不是参数diceNum中的数值
#self.get_parameter("diceNum")是获取参数
#.get_parameter_value()是获取参数的值
#.integer_value是获取整型数值
response.guess_result= True #如果猜正确,输出结果
else:
response.guess_result= False #如果猜错误,也输出结果
return response
def main(args=None): #main函数,程序执行的主入口
rclpy.init(args=args) # 初始化客户端库,必备步骤
node=GodServiceNodeWithParam("diceGameServiceGodWithParam") # 新建节点对象,必备步骤;传入参数,将Node实例化
rclpy.spin(node) # spin循环节点,保持节点运行,检测是否收到退出指令(Ctrl+C),必备步骤
rclpy.shutdown() # 关闭客户端库,必备步骤
- declara_parameter是声明参数的意思,注意不是之前常见的create_命令
- 获取参数的数值命令比较长,需要用到3步
- 1.get_parameter(“diceNum”)先获取参数
- 2.get_parameter_value()获取参数的值
- 3.integer_value获取值的类型
3.1.2 修改setup.py
修改setup.py,添加新的入口点,并取名为diceGameServiceWithParam,注意这个名字就是编译后的节点名称。

3.3 编译运行查看参数
依次colcon build, source install/setup.bash之后,运行服务端节点:
ros2 run god diceGameServiceWithParam
使用ros2 param list命令查看参数列表:

可以看到我们创建的diceNum参数已经出现了。
我们在创建参数的时候,给diceNum的值是0,如何查看呢?
使用ros2 param get /diceGameServiceGodWithParam diceNum获取parameter的值:
/diceGameServiceGodWithParam是节点名称;
diceNum是参数名称;

可以看到参数的数值是0
3.4 参数的手动设置
3.4.1 ros2 param set参数设置
我们想要控制骰子的点数,那么必然要有手段对参数的数值进人为修改;
使用ros2 param set /diceGameServiceGodWithParam diceNum 5修改parameter的值:
/diceGameServiceGodWithParam是节点名称;
diceNum是参数名称;
5是设置的数值;注意空格

显示设置参数成功
- 使用set只是在当前的会话中把参数修改了,并不是永久修改参数。
3.4.2 ros2 param dump参数保存
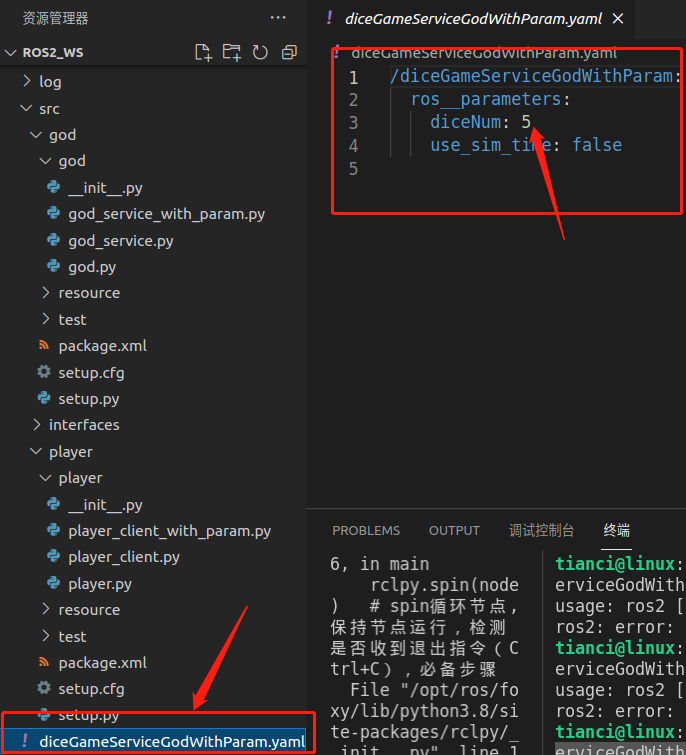
使用ros2 param dump /diceGameServiceGodWithParam将设置的参数保存,保存到一个yaml文件中

打开yaml文件,可以看到diceNum及其数值
3.4.3 加载参数文件
在ros2 run一个节点的时候加载参数文件,便可以直接修改节点中的参数
使用ros2 run god diceGameServiceWithParam --ros-args --params-file diceGameServiceGodWithParam.yaml运行节点并加载参数文件
- –ros-args
和–params-file是ros2 run命令的可选参数,后面跟咱们参数文件的名字,可以直接加载参数文件并运行节点

使用ros2 param get /diceGameServiceGodWithParam diceNum查看当前参数的数值:

可以看到diceNum的值从默认的0修改为了5.
至此,完成了手动控制骰子点数。
Categories: 机器人技术
Comments